
Una nueva mano robótica simplificará el proceso para agarrar y sostener objetos frágiles y de distintos tamaños. El innovador mecanismo ha sido desarrollado por científicos de la Universidad de Chicago (EEUU) y permitirá manipular con rapidez gran variedad de objetos cotidianos: bombillas, caramelos, vasos de cristal, lápices, tapones para oídos o huevos.
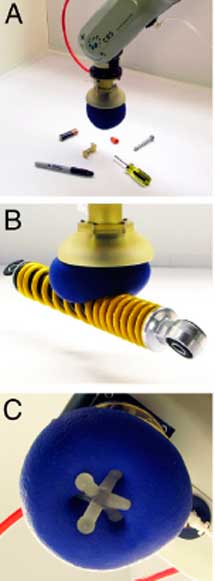
La mano robótica tiene una bolsa elástica con pequeñas partículas granuladas en su interior. Precisamente este material es el que dota al nuevo artilugio de una gran versatilidad. Las partículas granuladas de la bolsa se contraen y se endurecen y son capaces de pasar rápidamente de un estado maleable a sólido. Para lograrlo, el sistema conjuga tres mecanismos: fricción, succión y bloqueo.
El nuevo invento evita la necesidad de que haya contacto visual y de los sistemas sensitivos que requieren otros dedos robóticos. Eric Brown, autor principal de este estudio publicado en 'Proceedings of the National Academy of Sciences' (PNAS), afirma que la mayor parte de los diseños actuales se basan en manos con varios dedos (de dos a cinco) que necesitan complejos 'hardwares' y 'softwares' para funcionar. Normalmente tienen numerosas articulaciones, sistemas sensitivos para evitar que los objetos se rompan y programas de computación para decidir cuánta fuerza debe aplicar cada dedo y dónde. Y es que tareas tan sencillas para los humanos como agarrar un objeto son las más complicadas a la hora de programar un robot.
En esta mano robótica, los dedos individuales son sustituidos por una única masa de material granulado. Cuando la bolsa entra en contacto con el objeto que se desea agarrar, se adapta a su forma. Mediante la aplicación del vacío, el material se contrae y se endurece rápidamente, permitiendo sostener el objeto deseado. No se trata sólo de agarrarlo sino de sostenerlo con la firmeza necesaria para evitar que resbale y caiga mientras se manipula.
Sus creadores sostienen que la simplicidad de su mano robótica permitirá que la manipulación de objetos se haga con más rapidez y ahorrar costes. El sistema es universal porque se adapta a cualquier forma y medida y puede usarse en condiciones de humedad.





No hay comentarios:
Publicar un comentario